
Investor sa vás nikdy nespýta, koľko peňazí ste tento mesiac zarobili. Spýta sa na ARR, NRR, Magic Number alebo CAC Payback. Tento sprievodca nadväzuje na môj článok Kompletný sprievodca investičnými fázami startupu a rozoberá do hĺbky 49 metrík, ktoré rozhodujú o tom, či váš startup dostane ďalšie kolo financovania - alebo aj nie.
Obsah
Metriky tržieb
Metriky rastu
Obchodné metriky
Zdravie zákazníkov
Finančné zdravie
Prečo na metrikách vôbec záleží?
Predstavte si dve firmy. Prvá predala tento mesiac softvér za 250 000 € a budúci mesiac začína od nuly. Druhá zarobila len 80 000 €, ale každé euro pochádza z mesačného predplatného. Investor si vyberie druhú firmu - nie preto, že zarába viac, ale preto, že jej biznis je predvídateľný.
Presne to je dôvod, prečo vznikli SaaS a startupové metriky. Nejde o účtovnícke cvičenie ani o snahu komplikovať jednoduché veci. Ide o spoločný jazyk, ktorým founder, investor, CFO aj Head of Sales opisujú to isté - kvalitu a udržateľnosť rastu firmy. Bez tohto jazyka by sa dve firmy s rovnakým obratom mohli javiť ako rovnako zdravé, aj keď jedna z nich mesačne stráca polovicu zákazníkov a druhá rastie takmer bez straty jediného klienta.
Tento sprievodca rozoberá 49 najdôležitejších metrík rozdelených do piatich skupín. Pri každej z nich nájdete, prečo vznikla, ako sa počíta, praktický príklad, pohľad investora, najčastejšie chyby founderov, orientačné benchmarky a otázky, ktoré vám na túto tému môže investor položiť.
Nielen pre startupy
Je ľahké nadobudnúť dojem, že tieto metriky sú výmyslom venture kapitálu a týkajú sa iba firiem, ktoré naháňajú ďalšie investičné kolo. Realita je iná. MRR, churn, gross margin či CAC payback nie sú "startupový slovník", sú to len presnejšie, rýchlejšie a menej skreslené spôsoby, ako vidieť to, čo sa v každej firme deje aj tak. Rozdiel je len v tom, že zavedená firma si tieto otázky často kladie neskoro, nepravidelne, alebo vôbec.
Zoberme si tradičnú firmu s desaťročnou históriou a stabilným obratom. Jej manažment sleduje ročné tržby, možno kvartálne výsledky, a to je väčšinou všetko. Problém je, že ročné číslo skrýva presne to isté, čo sme opisovali pri ARR - nevidno v ňom, či rast pochádza od nových zákazníkov alebo od existujúcich, koľko zákazníkov firma potichu stráca, ani ako dlho trvá, kým sa investícia do získania klienta vráti. Firma tak môže rok čo rok rásť na papieri a pritom stavať na čoraz krehkejších základoch - kým to niekto neodhalí, väčšinou až v momente krízy.
Rovnaké otázky, iné odvetvia
Metriky rastu a zdravia zákazníkov nie sú viazané na SaaS ani na softvér vôbec. Retailová firma má svoj CAC (koľko stojí získať nového zákazníka cez reklamu alebo pobočku) aj svoj LTV (koľko zákazník minie za celú dobu, čo u nej nakupuje). Výrobná firma má svoj Gross Margin, svoj Burn Rate počas sezónnych výkyvov aj svoj Runway, ak čaká na veľkú zákazku. Poisťovňa má svoju verziu Churn Rate - nazýva sa miera obnovy zmlúv - a svoju verziu NRR, keď počíta, koľko dodatočných produktov predá existujúcim klientom.
Rozdiel medzi startupom a zabehnutou firmou nie je v tom, či tieto javy existujú, ale v tom, kto si ich pomenuje a systematicky meria. Firma, ktorá pozná svoj skutočný CAC Payback Period, vie oveľa presnejšie rozhodnúť, koľko môže bezpečne investovať do marketingu budúci rok. Firma, ktorá pozná svoju Net Revenue Retention, vie, či má zmysel naháňať nových zákazníkov, alebo či sa oveľa viac oplatí investovať do starostlivosti o tých existujúcich.
Prečo by ich mala používať aj vaša firma
Najväčšia hodnota týchto metrík nie je v tom, že ich raz za čas niekto vypočíta pre investora alebo banku pri žiadosti o úver. Je v tom, že keď sa sledujú pravidelne, fungujú ako včasný varovný systém. Rastúci churn sa dá odhaliť v momente, keď je ešte malý - nie o rok neskôr, keď sa už prejaví v poklese celkových tržieb. Klesajúca efektivita marketingu sa dá vidieť na CAC skôr, než sa prejaví na cash flow. Zhoršujúca sa marža sa dá zachytiť skôr, než sa premietne do straty.
Práve preto tieto metriky nepatria len founderom, ktorí sa pripravujú na pitch pred investormi. Patria každému CEO, CFO, Head of Sales alebo majiteľovi firmy, ktorý chce firmu riadiť podľa dát, a nie len podľa pocitu, že "tento rok to vyzerá dobre". Rozdiel medzi firmou, ktorá tieto čísla pozná, a firmou, ktorá ich nepozná, sa väčšinou neprejaví hneď - prejaví sa presne vo chvíli, keď treba rýchlo rozhodnúť, kam investovať ďalšie euro, alebo prečo zrazu prestal fungovať rast, ktorý ešte vlani vyzeral samozrejmý.
Metriky tržieb
1. Revenue (Tržby)
Revenue je najstaršia a najjednoduchšia finančná metrika, no práve preto sa dá najľahšie zneužiť pri prezentácii investorovi. Ide o celkovú sumu peňazí, ktorú firma získala z predaja produktov alebo služieb za dané obdobie a bez ohľadu na to, či ide o jednorazový predaj alebo opakované predplatné.
Problém je, že samotné revenue nehovorí nič o kvalite biznisu. Firma môže mať vysoké tržby jeden mesiac a nulové ďalší. Preto sa pri SaaS firmách revenue takmer nikdy nesleduje samostatne a vždy sa dopĺňa metrikami ako MRR alebo ARR, ktoré zachytávajú, akú časť tržieb tvorí predvídateľný, opakovaný príjem.
💡
Príklad: Firma predá v januári softvérové licencie za 40 000 € a poradenské služby za 10 000 €. Celkové revenue za január je 50 000 €. Bez ďalšieho kontextu však nevieme, či sa toto číslo zopakuje aj vo februári.
Najčastejšia chyba founderov: prezentovať investorovi kumulatívne revenue za celú históriu firmy namiesto revenue za jasne definované, porovnateľné obdobie (mesiac, kvartál, rok).
2. Recurring Revenue (Opakované tržby)
Recurring Revenue vznikol ako spôsob, ako oddeliť tržby, ktoré sa firme s vysokou pravdepodobnosťou zopakujú aj nasledujúci mesiac, od tých, ktoré sú jednorazové. Ide o časť revenue, ktorá pochádza z predplatného alebo zmluvne viazaných platieb, nie z jednorazového predaja licencie či konzultácie.
Investor sa pri tejto metrike v podstate pýta: "Keby ste dnes prestali predávať novým zákazníkom, koľko peňazí by firma aj tak zarobila budúci mesiac?" Čím vyšší je podiel recurring revenue na celkových tržbách, tým je biznis stabilnejší a ľahšie oceniteľný.
💡
Príklad: Z celkových 50 000 € mesačných tržieb pochádza 35 000 € z predplatného (recurring) a 15 000 € z jednorazových implementačných poplatkov (non-recurring). Recurring Revenue je teda 35 000 €.
Najčastejšia chyba founderov: zarátavať do recurring revenue aj jednorazové onboarding alebo implementačné poplatky, čím sa umelo nafukuje predvídateľnosť biznisu.
3. MRR (Monthly Recurring Revenue)
MRR vzniklo ako praktická skratka pre mesačnú verziu ARR - v ranných fázach startupu, keď ešte ročné zmluvy ani ročné plánovanie nedávajú zmysel, je mesačný pohľad presnejší a viac akčný. MRR predstavuje sumu opakovaných príjmov, ktorú firma dostane za jeden mesiac, prepočítanú na mesačnú bázu aj pre zákazníkov platiacich ročne.
Práve MRR je metrika, ktorú SaaS firmy sledujú najčastejšie, pretože ako jediná dokáže mesiac čo mesiac ukázať, či firma reálne rastie, stagnuje, alebo stráca zákazníkov.
💡
Príklad: 500 zákazníkov platí v priemere 200 € mesačne. MRR = 500 × 200 € = 100 000 €. Ak by 50 z nich platilo ročne 2 400 €, ich mesačný ekvivalent (200 €) sa do MRR započíta rovnako.
Ako ju používajú investori: Investor rozkladá MRR na New MRR, Expansion MRR, Contraction MRR a Churned MRR, aby videl, odkiaľ rast skutočne pochádza - či od nových zákazníkov, alebo od tých, ktorí už platia viac.
4. ARR (Annual Recurring Revenue)
Prečo ARR vôbec vzniklo?
Ak by ste sa spýtali investora, koľko dnes startup zarobil, pravdepodobne vám nepovie konkrétnu sumu. Nie preto, že by tržby neboli dôležité, ale preto, že jednorazové príjmy nevypovedajú veľa o budúcnosti firmy. Práve preto investori sledujú ARR - metriku, ktorá vznikla ako ročný ekvivalent MRR pre firmy, ktoré už majú stabilnú zákaznícku základňu.
Čo ARR znamená?
ARR predstavuje hodnotu opakovaných ročných príjmov. Ak dnes firma prestane predávať novým zákazníkom a všetci existujúci budú pokračovať v platení, ARR ukazuje, aký príjem firma vygeneruje počas nasledujúcich dvanástich mesiacov. Nejde teda o prognózu predaja, ale o hodnotu už vybudovaného biznisu.
💡
Príklad: 500 zákazníkov platí 200 € mesačne. MRR = 100 000 €. ARR = 100 000 € × 12 = 1 200 000 €.
Prečo ARR milujú investori?
Pretože je predvídateľné. Startup s ARR 5 miliónov eur je oveľa jednoduchšie oceniť ako firmu, ktorá každý mesiac predáva nanovo. Práve preto sa valuácie SaaS spoločností často počítajú ako násobok ARR.
Najčastejšia chyba founderov
Veľa founderov prezentuje celkové tržby namiesto ARR. Investor sa pritom pýta práve na ARR a tieto čísla môžu byť dramaticky odlišné, najmä ak firma predáva aj jednorazové služby.
Čo sa oplatí sledovať: rast ARR medzi kvartálmi, podiel nového ARR, ARR z upsellov, ARR stratené churnom, čistý rast ARR.
5. ACV (Annual Contract Value)
ACV vzniklo v momente, keď firmy zistili, že ARR samotné nestačí na porovnávanie zmlúv rôznej dĺžky. ACV predstavuje priemernú ročnú hodnotu jednej zmluvy - teda koľko je jeden konkrétny zákaznícky kontrakt hodný ročne, bez ohľadu na to, či je zmluva podpísaná na jeden rok alebo na tri.
Táto metrika je kľúčová najmä pre B2B firmy s enterprise zákazníkmi, kde sa dĺžka zmlúv výrazne líši a kde jednoduché delenie celkovej sumy zmluvy počtom rokov skresľuje skutočnú ročnú hodnotu.
💡
Príklad: Zákazník podpíše trojročnú zmluvu v celkovej hodnote 90 000 €. ACV = 90 000 € / 3 = 30 000 € ročne.
Ako ju používajú investori: Investor porovnáva priemerné ACV naprieč segmentmi zákazníkov (SMB vs. enterprise), aby zistil, na koho sa firma reálne zameriava a kde je najväčší priestor na rast.
6. TCV (Total Contract Value)
Kým ACV rozpočítava hodnotu zmluvy na jeden rok, TCV vzniklo pre presne opačný účel - ukázať celkovú hodnotu zmluvy za celé jej trvanie. TCV teda zahŕňa aj jednorazové poplatky, ktoré sa v ARR ani ACV nezobrazujú.
💡
Príklad: Trojročná zmluva s ročným predplatným 30 000 € a jednorazovým implementačným poplatkom 15 000 € má TCV = (30 000 € × 3) + 15 000 € = 105 000 €.
Najčastejšia chyba founderov: zamieňať TCV a ARR pri prezentácii investorovi, čo môže vytvoriť dojem oveľa vyššieho opakovaného príjmu, než firma v skutočnosti má.
7. Bookings
Bookings vznikli ako spôsob merania obchodnej aktivity v momente, keď je zmluva podpísaná - nie v momente, keď je za ňu vystavená faktúra, alebo keď je príjem účtovne uznaný. Bookings teda predstavujú celkovú hodnotu všetkých nových a obnovených zmlúv podpísaných za dané obdobie.
Táto metrika je dôležitá najmä pre sales tímy, pretože ukazuje, koľko nového biznisu sa reálne uzavrelo, bez ohľadu na to, kedy sa peniaze skutočne premietnu do cash flow firmy.
💡
Príklad: Obchodný tím uzavrie v marci zmluvy v celkovej hodnote 200 000 €, aj keď platby od zákazníkov prídu rozložené počas nasledujúcich dvanástich mesiacov. Bookings za marec sú 200 000 €.
8. Billings
Billings vznikli ako doplnok k bookings - kým bookings zachytáva moment podpisu zmluvy, billings zachytáva moment, kedy je zákazníkovi reálne vystavená faktúra. Ide teda o sumu, ktorú firma zákazníkovi fakturovala za dané obdobie, bez ohľadu na to, kedy bola zmluva podpísaná.
💡
Príklad: Zmluva podpísaná v januári (bookings) na ročné predplatné fakturované štvrťročne vygeneruje billings 25 % celkovej hodnoty zmluvy každý kvartál.
Ako ju používajú investori: Billings sú užitočným indikátorom pre odhad budúceho cash flow, keďže sú bližšie k reálnemu peňažnému toku než bookings alebo revenue recognition.
9. Revenue Recognition
Revenue Recognition vzniklo z účtovnej potreby presne definovať, kedy sa peniaze zákazníka smú považovať za skutočný príjem firmy. Pri SaaS zmluvách sa platba často prijme vopred (napríklad ročne), ale účtovne sa uznáva postupne, mesiac po mesiaci, počas trvania služby.
💡
Príklad: Zákazník zaplatí 12 000 € vopred za ročné predplatné. Firma túto sumu neúčtuje ako revenue jednorazovo, ale uznáva 1 000 € revenue každý mesiac počas nasledujúcich dvanástich mesiacov.
Najčastejšia chyba founderov: prezentovať investorovi prijaté platby ako okamžitý revenue, čo skresľuje mesačné a kvartálne výsledky firmy.
10. Expansion Revenue
Expansion Revenue vzniklo, keď si SaaS firmy uvedomili, že najlacnejší spôsob rastu nie je získavanie nových zákazníkov, ale predaj existujúcim. Ide o dodatočný príjem od už existujúcich zákazníkov - napríklad cez upsell (vyšší balík) alebo cross-sell (ďalší produkt).
💡
Príklad: Zákazník platiaci 200 € mesačne prejde na vyšší balík za 350 €. Expansion Revenue z tohto zákazníka je 150 € mesačne.
Ako ju používajú investori: Vysoký podiel expansion revenue na celkovom raste je jedným z najsilnejších signálov zdravého SaaS biznisu, pretože znamená rast bez nutnosti draho získavať nových zákazníkov.
11. Average Revenue Per User (ARPU)
ARPU vzniklo v telekomunikačnom priemysle a neskôr sa presunulo aj do SaaS sveta ako spôsob merania, koľko v priemere zarobí firma na jednom aktívnom používateľovi za dané obdobie.
💡
Príklad: MRR 100 000 € vygenerovaných od 2 000 aktívnych používateľov znamená ARPU = 100 000 € / 2 000 = 50 € mesačne.
Najčastejšia chyba founderov: počítať ARPU zo všetkých registrovaných používateľov vrátane neaktívnych alebo tých na bezplatnom pláne, čím sa metrika umelo znižuje.
12. Average Revenue Per Account (ARPA)
ARPA vzniklo ako presnejšia alternatíva k ARPU pre B2B firmy, kde jeden zákaznícky účet (napríklad firma) môže mať desiatky jednotlivých používateľov. Namiesto počítania na jedného používateľa sa ARPA počíta na jeden platiaci účet/zákazníka.
💡
Príklad: MRR 100 000 € od 500 platiacich firemných účtov znamená ARPA = 100 000 € / 500 = 200 € mesačne na účet.
Ako ju používajú investori: Rastúce ARPA v čase je znakom úspešného upsellu a cross-sellu do existujúcej zákazníckej základne.
Metriky rastu
13. CAC (Customer Acquisition Cost)
CAC vzniklo z jednoduchej, no pre investorov kľúčovej otázky: koľko firmu stojí získať jedného nového platiaceho zákazníka? Zahŕňa všetky náklady na marketing a sales za dané obdobie, vydelené počtom nových zákazníkov získaných za rovnaké obdobie.
💡
Príklad: Firma minie na marketing a sales 50 000 € za mesiac a získa 100 nových zákazníkov. CAC = 50 000 € / 100 = 500 € na zákazníka.
Ako ju používajú investori: CAC sama o sebe nič nehovorí - má zmysel iba v spojení s LTV. Nízky CAC pri nízkej hodnote zákazníka môže byť rovnako zlý ako vysoký CAC pri vysokej hodnote.
Najčastejšia chyba founderov: počítať CAC iba z nákladov na platenú reklamu a zabúdať na mzdy obchodníkov, marketérov a nástroje, čo číslo výrazne podhodnocuje.
14. LTV (Lifetime Value)
LTV vzniklo ako protiváha k CAC - odpovedá na otázku, koľko firme celkovo zarobí jeden zákazník počas celého trvania spolupráce. Najjednoduchšie sa počíta ako priemerný mesačný príjem na zákazníka vynásobený priemernou dĺžkou života zákazníka (ktorá súvisí s churn rate).
💡
Príklad: Zákazník platí v priemere 200 € mesačne a priemerná dĺžka jeho života u firmy je 24 mesiacov. LTV = 200 € × 24 = 4 800 €.
Najčastejšia chyba founderov: počítať LTV z hrubého revenue namiesto z gross marže, čím sa preceňuje skutočná hodnota, ktorú zákazník firme prináša po odpočítaní nákladov na obsluhu.
15. LTV/CAC Ratio
Tento pomer vznikol, pretože ani CAC, ani LTV samostatne nedávajú úplný obraz o zdraví biznis modelu. LTV/CAC Ratio porovnáva, koľko firma zarobí na zákazníkovi oproti tomu, koľko ju stálo ho získať.
💡
Príklad: LTV = 4 800 €, CAC = 500 €. LTV/CAC Ratio = 4 800 / 500 = 9,6.
Ako ju používajú investori: Všeobecne akceptovaný benchmark je pomer aspoň 3:1. Pomer pod 1:1 znamená, že firma prerába na každom novom zákazníkovi. Príliš vysoký pomer (napríklad nad 10:1) môže naopak signalizovať, že firma investuje do rastu príliš málo a mohla by rásť rýchlejšie.
16. CAC Payback Period
CAC Payback Period vzniklo ako doplnok k LTV/CAC Ratio, pretože pomer 3:1 môže vyzerať skvele, no neukazuje, ako dlho firme trvá, kým sa investícia do zákazníka vráti. Táto metrika meria počet mesiacov potrebných na to, aby príjem od zákazníka pokryl náklady na jeho získanie.
💡
Príklad: CAC = 500 €, zákazník platí 100 € mesačne s hrubou maržou 80 % (teda 80 € hrubého zisku mesačne). CAC Payback Period = 500 € / 80 € ≈ 6,25 mesiaca.
Ako ju používajú investori: Kratší payback period znamená, že firma môže rýchlejšie reinvestovať kapitál do ďalšieho rastu. Benchmark pre zdravý SaaS biznis je zvyčajne 12 až 18 mesiacov.
17. Magic Number
Magic Number vzniklo ako rýchly spôsob, ako investor dokáže za pár sekúnd posúdiť efektivitu sales a marketingového tímu bez toho, aby musel počítať CAC Payback do detailu. Meria, koľko nového ARR firma vygeneruje na jedno euro investované do sales a marketingu v predchádzajúcom období.
💡
Príklad: Firma pridá Net New ARR 400 000 € v kvartáli, pričom v predchádzajúcom kvartáli minula na sales a marketing 500 000 €. Magic Number = 400 000 / 500 000 = 0,8.
Ako ju používajú investori: Hodnota nad 0,75 sa väčšinou považuje za signál, že firma môže bezpečne zvyšovať investície do rastu. Hodnota pod 0,5 naznačuje, že sales a marketing zatiaľ nie sú dostatočne efektívne.
18. Sales Efficiency
Sales Efficiency je širší pojem než Magic Number a vzniklo ako všeobecné meradlo toho, koľko výnosu firma získa za každé euro vynaložené na obchodný a marketingový tím - často sa počíta na ročnej báze alebo naprieč viacerými obdobiami, aby sa vyhladili výkyvy.
💡
Príklad: Firma minie za rok 2 milióny € na sales a marketing a vygeneruje 1,8 milióna € nového ARR. Sales Efficiency = 1,8 / 2 = 0,9.
Najčastejšia chyba founderov: porovnávať Sales Efficiency naprieč firmami s úplne odlišnou dĺžkou sales cyklu, bez zohľadnenia oneskoreného efektu investícií do marketingu.
19. Rule of 40
Rule of 40 vzniklo ako spôsob, ako v jednom čísle skombinovať rast aj ziskovosť firmy - dve metriky, ktoré si často protirečia, pretože firma môže rásť rýchlo za cenu vysokých strát, alebo byť zisková za cenu pomalého rastu. Pravidlo hovorí, že súčet miery rastu a ziskovej marže (napríklad EBITDA Margin) by mal byť aspoň 40 %.
💡
Príklad: Firma rastie medziročne o 30 % a má EBITDA maržu -5 % (teda je mierne stratová). Rule of 40 = 30 % + (-5 %) = 25 %, čo je pod odporúčaným prahom.
Ako ju používajú investori: Firmy nad 40 % sa považujú za zdravo vyvážené medzi rastom a ziskovosťou, čo je obzvlášť dôležité v neskorších fázach (Series B a vyššie).
20. Growth Rate
Growth Rate je jedna z najsledovanejších, no zároveň najľahšie skresliteľných metrík. Vzniklo ako percentuálne vyjadrenie toho, o koľko narástol MRR, ARR alebo revenue firmy medzi dvomi obdobiami - najčastejšie medzimesačne (MoM) alebo medziročne (YoY).
💡
Príklad: ARR narástol z 1 000 000 € na 1 300 000 € za rok. Growth Rate (YoY) = (1 300 000 - 1 000 000) / 1 000 000 = 30 %.
Najčastejšia chyba founderov: prezentovať growth rate počítaný z veľmi nízkej základne (napríklad rast zo 4 na 8 zákazníkov = 100 % rast), čo pôsobí efektne, no nič nehovorí o reálnej veľkosti biznisu.
21. Net New ARR
Net New ARR vzniklo ako presnejšia verzia rastu ARR, ktorá zohľadňuje nielen nový biznis, ale aj stratený. Ide o čistý prírastok ARR za dané obdobie - teda nové ARR plus expansion ARR, mínus ARR stratené churnom a kontrakciou.
💡
Príklad: Nové ARR za kvartál = 300 000 €, Expansion ARR = 50 000 €, Churned ARR = 80 000 €. Net New ARR = 300 000 + 50 000 - 80 000 = 270 000 €.
Ako ju používajú investori: Net New ARR je podkladom pre výpočet Magic Number a Sales Efficiency, pretože zachytáva skutočný, nie len hrubý rast firmy.
22. Revenue per Employee
Revenue per Employee vzniklo ako jednoduchý spôsob merania produktivity celej organizácie - nielen sales tímu. Počíta sa ako celkové ročné revenue vydelené celkovým počtom zamestnancov firmy.
💡
Príklad: Firma s ARR 5 000 000 € a 40 zamestnancami má Revenue per Employee = 5 000 000 / 40 = 125 000 € na zamestnanca.
Ako ju používajú investori: Táto metrika sa často porovnáva naprieč odvetvím - efektívne SaaS firmy sa v zrelšej fáze pohybujú okolo 150 000 až 200 000 € na zamestnanca, čo naznačuje, že firma nerastie len naberaním ľudí, ale aj zvyšovaním efektivity.
Obchodné metriky
23. Pipeline
Pipeline vzniklo ako spôsob, ako sales tímy a investori vidia, koľko potenciálneho biznisu je aktuálne "v hre" - teda súčet hodnôt všetkých otvorených obchodných príležitostí, ktoré ešte neboli ani vyhraté, ani stratené.
💡
Príklad: Firma má 40 otvorených príležitostí v rôznych fázach predaja s celkovou hodnotou 800 000 €. Pipeline = 800 000 €.
Najčastejšia chyba founderov: nechávať v pipeline dávno neaktívne alebo mŕtve príležitosti, čo umelo nafukuje jeho hodnotu a skresľuje forecast.
24. Pipeline Coverage
Pipeline Coverage vzniklo ako spôsob, ako vopred odhadnúť, či má sales tím dostatok príležitostí na splnenie plánovaných tržieb. Počíta sa ako pomer celkového pipeline k cieľovým tržbám (quote) na dané obdobie.
💡
Príklad: Cieľ na kvartál je 200 000 € nového revenue, pipeline má hodnotu 800 000 €. Pipeline Coverage = 800 000 / 200 000 = 4x.
Ako ju používajú investori: Bežný benchmark je pokrytie 3x až 4x cieľa - nižšie pokrytie signalizuje riziko nesplnenia plánu, výrazne vyššie môže znamenať, že sales tím má príliš veľa nekvalifikovaných príležitostí.
25. Weighted Pipeline
Weighted Pipeline vzniklo ako presnejšia alternatíva k obyčajnému pipeline, ktorý zaobchádza so všetkými príležitosťami rovnako, bez ohľadu na to, ako blízko sú k uzavretiu. Táto metrika násobí hodnotu každej príležitosti pravdepodobnosťou jej uzavretia podľa fázy, v ktorej sa nachádza.
💡
Príklad: Príležitosť v hodnote 50 000 € vo fáze s 30 % pravdepodobnosťou uzavretia prispieva do Weighted Pipeline sumou 50 000 € × 0,3 = 15 000 €.
26. Win Rate
Win Rate vzniklo ako základná metrika kvality sales procesu - ukazuje, aké percento uzavretých príležitostí (vyhraných aj prehraných) firma skutočne vyhrá.
💡
Príklad: Za kvartál bolo uzavretých 100 príležitostí, z toho 25 vyhraných. Win Rate = 25 / 100 = 25 %.
Najčastejšia chyba founderov: počítať win rate zo všetkých vytvorených príležitostí vrátane tých stále otvorených, čím sa číslo umelo skresľuje.
27. Conversion Rate
Conversion Rate vzniklo ako všeobecnejšia verzia Win Rate, ktorá sa dá aplikovať na akýkoľvek prechod medzi dvomi fázami zákazníckej cesty - napríklad z lead na kvalifikovaný lead, alebo z demo na uzavretý obchod.
💡
Príklad: Zo 400 leadov sa 80 stane kvalifikovanými príležitosťami. Conversion Rate medzi fázami = 80 / 400 = 20 %.
Ako ju používajú investori: Investor sleduje conversion rate na každom kroku funnelu, aby identifikoval, kde presne firma stráca najviac potenciálnych zákazníkov.
28. Sales Velocity
Sales Velocity vzniklo ako spôsob, ako v jednom čísle vyjadriť rýchlosť, akou firma generuje revenue zo svojho sales procesu. Kombinuje počet príležitostí, priemernú hodnotu obchodu, win rate a dĺžku sales cyklu do jedného ukazovateľa.
💡
Príklad: 50 príležitostí × priemerná hodnota 10 000 € × win rate 25 % / dĺžka cyklu 60 dní = Sales Velocity približne 2 083 € vygenerovaného revenue za deň.
29. Sales Cycle Length
Sales Cycle Length vzniklo ako meranie priemerného počtu dní od prvého kontaktu so zákazníkom po podpis zmluvy. Táto metrika priamo ovplyvňuje, ako rýchlo sa firme vracia investícia do sales a marketingu.
💡
Príklad: Priemerný čas medzi prvým demom a podpisom zmluvy je 45 dní. Sales Cycle Length = 45 dní.
Najčastejšia chyba founderov: neoddeľovať sales cycle length pre rôzne segmenty zákazníkov (SMB vs. enterprise), ktoré sa môžu líšiť aj niekoľkonásobne.
30. Average Deal Size
Average Deal Size vzniklo ako jednoduchý ukazovateľ priemernej hodnoty jedného uzavretého obchodu - počíta sa ako celková hodnota vyhraných obchodov vydelená ich počtom.
💡
Príklad: Za kvartál firma uzavrie obchody v celkovej hodnote 500 000 € v 25 zmluvách. Average Deal Size = 500 000 / 25 = 20 000 €.
31. Forecast Accuracy
Forecast Accuracy vzniklo ako spôsob, ako overiť, nakoľko sa dá sales manažmentu firmy dôverovať. Meria, ako presne sa predpovedané tržby na dané obdobie zhodujú so skutočne dosiahnutými tržbami.
💡
Príklad: Firma predpovedala kvartálne tržby 500 000 €, reálne dosiahla 480 000 €. Forecast Accuracy = 480 000 / 500 000 = 96 %.
Ako ju používajú investori: Nízka forecast accuracy je jedným z najväčších varovných signálov pre investora, pretože naznačuje, že manažment firmy nerozumie vlastnému biznisu dostatočne dobre.
32. Quota
Quota vznikla ako cieľová suma tržieb, ktorú má konkrétny obchodník alebo celý sales tím dosiahnuť za dané obdobie - typicky mesiac, kvartál alebo rok.
💡
Príklad: Obchodník má stanovenú kvartálnu quotu 150 000 € nového revenue.
33. Quota Attainment
Quota Attainment vzniklo ako percentuálne vyjadrenie toho, akú časť svojej quoty obchodník alebo tím reálne splnil. Táto metrika sa sleduje na úrovni jednotlivca aj celého sales tímu.
💡
Príklad: Obchodník s quotou 150 000 € dosiahne 135 000 €. Quota Attainment = 135 000 / 150 000 = 90 %.
Ako ju používajú investori: Ak menej ako polovica sales tímu dosahuje quotu, je to signál, že buď je quota nastavená nereálne, alebo sales proces nefunguje.
Zdravie zákazníkov
34. Churn Rate
Churn Rate vzniklo ako najzákladnejšia miera toho, koľko zákazníkov (alebo koľko príjmu) firma stráca za dané obdobie. Existuje v dvoch podobách - logo churn (počet stratených zákazníkov) a revenue churn (stratený príjem).
💡
Príklad: Na začiatku mesiaca malo firma 500 zákazníkov, počas mesiaca odišlo 15. Logo Churn Rate = 15 / 500 = 3 % mesačne.
Najčastejšia chyba founderov: prezentovať iba ročný churn namiesto mesačného, keďže aj zdanlivo malý mesačný churn (napríklad 3 %) sa v ročnom vyjadrení výrazne zväčší.
35. Revenue Churn
Revenue Churn vzniklo ako presnejšia alternatíva k logo churn, pretože nie všetci zákazníci majú rovnakú hodnotu. Táto metrika meria, aké percento MRR alebo ARR firma stratila odchodom alebo znížením platieb existujúcich zákazníkov.
💡
Príklad: Firma mala na začiatku mesiaca MRR 100 000 €, počas mesiaca stratila 4 000 € MRR odchodom a znížením platieb zákazníkov. Revenue Churn = 4 000 / 100 000 = 4 %.
36. Gross Revenue Retention (GRR)
GRR vzniklo ako spôsob merania, koľko z existujúceho MRR/ARR firma udrží za dané obdobie - bez zarátania akéhokoľvek upsellu. Na rozdiel od NRR teda GRR nikdy neprekročí 100 %.
💡
Príklad: Firma začína rok s ARR 1 000 000 € od existujúcich zákazníkov. Počas roka stratí churnom a downgradmi 120 000 €. GRR = (1 000 000 - 120 000) / 1 000 000 = 88 %.
Ako ju používajú investori: GRR nad 90 % sa považuje za znak veľmi zdravého, "lepiaceho" produktu, ktorého sa zákazníci nechcú vzdať.
37. Net Revenue Retention (NRR)
NRR vzniklo ako jedna z najsledovanejších metrík v SaaS svete, pretože ako jediná dokáže zachytiť súčasne stratu aj rast príjmu z existujúcej zákazníckej základne. Na rozdiel od GRR, NRR môže prekročiť 100 %, ak expansion revenue prevýši straty z churnu.
💡
Príklad: Firma začína rok s ARR 1 000 000 € od existujúcich zákazníkov. Stratí 120 000 € churnom, ale získa 180 000 € z upsellu. NRR = (1 000 000 - 120 000 + 180 000) / 1 000 000 = 106 %.
Ako ju používajú investori: NRR nad 100 % znamená, že firma by rástla aj bez jediného nového zákazníka. Najlepšie SaaS firmy dosahujú NRR 120 % a viac.
Najčastejšia chyba founderov: zamieňať NRR a GRR pri prezentácii - vysoké NRR môže maskovať vysoký churn, ktorý je iba prekrytý ešte vyšším upsellom.
38. Logo Retention
Logo Retention vzniklo ako doplnok k revenue metrikám, pretože sleduje počet zákazníkov, nie peniaze. Ide o percento zákazníkov, ktorí zostávajú s firmou za dané obdobie.
💡
Príklad: Z 500 zákazníkov na začiatku roka zostane na konci roka 460. Logo Retention = 460 / 500 = 92 %.
Ako ju používajú investori: Vysoká Logo Retention pri nízkej Revenue Retention môže signalizovať, že firma síce neztráca zákazníkov, ale títo zákazníci znižujú svoje platby.
39. Upsell
Upsell vzniklo ako pojem pre situáciu, keď existujúci zákazník zvýši svoje platby prechodom na drahší balík alebo tarifu v rámci toho istého produktu.
💡
Príklad: Zákazník na balíku za 200 € mesačne prejde na balík za 350 €. Upsell = 150 € dodatočného MRR.
40. Cross-sell
Cross-sell vzniklo ako pojem pre predaj úplne iného produktu alebo modulu existujúcemu zákazníkovi - na rozdiel od upsellu, kde ide o vyšší balík toho istého produktu.
💡
Príklad: Zákazník používajúci CRM modul si doplatí za nový modul na fakturáciu. Táto dodatočná platba je cross-sell.
Finančné zdravie
41. Gross Margin (Hrubá marža)
Gross Margin vzniklo ako základná miera ziskovosti produktu - ukazuje, aké percento z revenue zostane firme po odpočítaní priamych nákladov na poskytovanie služby (napríklad hosting, zákaznícka podpora, licencie tretích strán).
💡
Príklad: Revenue 100 000 €, priame náklady na poskytovanie služby 25 000 €. Gross Margin = (100 000 - 25 000) / 100 000 = 75 %.
Ako ju používajú investori: SaaS firmy sa zvyčajne hodnotia podľa gross marže 75 % a vyššej - nižšia marža môže signalizovať, že biznis model je bližšie k službám než k softvéru.
42. EBITDA
EBITDA vzniklo ako spôsob porovnávania ziskovosti firiem bez ohľadu na ich úrokové náklady, dane a účtovné odpisy - teda ako zisk pred úrokmi, daňami, odpismi a amortizáciou.
💡
Príklad: Firma má revenue 5 000 000 €, prevádzkové náklady 4 700 000 €, odpisy 200 000 €. EBITDA = 5 000 000 - 4 700 000 = 300 000 € (odpisy sa naspäť pripočítavajú, ak boli už odpočítané v prevádzkových nákladoch).
43. EBITDA Margin
EBITDA Margin vzniklo ako percentuálne vyjadrenie EBITDA voči celkovému revenue, čo umožňuje porovnávať ziskovosť firiem rôznej veľkosti.
💡
Príklad: EBITDA 300 000 € pri revenue 5 000 000 €. EBITDA Margin = 300 000 / 5 000 000 = 6 %.
44. Operating Cash Flow
Operating Cash Flow vzniklo ako presnejší ukazovateľ finančného zdravia než EBITDA, pretože sleduje skutočný pohyb hotovosti z prevádzkovej činnosti firmy, nie iba účtovný zisk.
💡
Príklad: Firma vykazuje účtovný zisk, no zákazníci platia so 60-dňovým oneskorením - Operating Cash Flow tak môže byť dočasne záporný aj pri kladnom účtovnom zisku.
45. Burn Rate
Burn Rate vzniklo ako spôsob merania, koľko hotovosti firma mesačne "spáli" - teda o koľko sa znižuje jej bankový účet, keď výdavky prevyšujú príjmy. Rozlišuje sa Gross Burn (celkové výdavky) a Net Burn (výdavky mínus príjmy).
💡
Príklad: Firma minie mesačne 200 000 € a zarobí 120 000 €. Net Burn Rate = 200 000 - 120 000 = 80 000 € mesačne.
Ako ju používajú investori: Burn Rate sa vždy sleduje spolu s Runway - vysoký burn nie je automaticky problém, ak ho sprevádza dostatočne rýchly rast a dostatok kapitálu.
46. Runway
Runway vzniklo ako odpoveď na najdôležitejšiu otázku pre každý startup: koľko mesiacov firma prežije pri súčasnom Burn Rate, kým jej nedôjdu peniaze na účte.
💡
Príklad: Firma má na účte 960 000 € a Net Burn Rate 80 000 € mesačne. Runway = 960 000 / 80 000 = 12 mesiacov.
Najčastejšia chyba founderov: začať fundraising proces až vtedy, keď zostáva menej ako 6 mesiacov runway, namiesto odporúčaných 12 až 18 mesiacov vopred.
47. Free Cash Flow
Free Cash Flow vzniklo ako ukazovateľ hotovosti, ktorá firme zostane po odpočítaní kapitálových výdavkov (napríklad investícií do vybavenia či infraštruktúry) od prevádzkového cash flow.
💡
Príklad: Operating Cash Flow -50 000 €, kapitálové výdavky 10 000 €. Free Cash Flow = -50 000 - 10 000 = -60 000 € za dané obdobie.
48. ROI (Return on Investment)
ROI vzniklo ako univerzálna miera návratnosti akejkoľvek investície - vyjadruje pomer medzi ziskom z investície a jej nákladmi, vynásobený stom pre percentuálne vyjadrenie.
💡
Príklad: Investícia 10 000 € do novej funkcie produktu vygeneruje dodatočný zisk 15 000 €. ROI = (15 000 - 10 000) / 10 000 = 50 %.
49. ROAS (Return on Ad Spend)
ROAS vzniklo špecificky pre marketingové tímy ako užšia verzia ROI, zameraná výhradne na platenú reklamu. Meria, koľko revenue firma získa na každé investované euro do reklamy.
💡
Príklad: Firma minie 20 000 € na reklamu a vygeneruje z nej 80 000 € revenue. ROAS = 80 000 / 20 000 = 4, teda 4 € revenue na každé investované euro.
Najčastejšia chyba founderov: počítať ROAS z hrubého revenue namiesto z gross marže, čím sa efektivita reklamy výrazne preceňuje.
Záver
Žiadna z týchto 49 metrík nefunguje dobre osamote. ARR bez Net Revenue Retention nepovie nič o tom, či firma zákazníkov udrží. CAC bez LTV nepovie nič o tom, či je akvizícia zákazníkov vôbec zisková. Win Rate bez Sales Cycle Length nepovie nič o tom, ako rýchlo sa peniaze reálne dostanú do firmy.
Práve preto skúsení investori nikdy nehodnotia startup podľa jedného čísla. Skladajú si obraz z desiatok metrík naprieč tržbami, rastom, predajom, zdravím zákazníkov a finančným zdravím a presne tento obraz rozhoduje o tom, či firma dostane ďalšie kolo financovania, za akú valuáciu, a či vôbec.
Pre founderov je preto najdôležitejšie jedno: nesnažiť sa vybrať tie metriky, ktoré vyzerajú najlepšie, ale rozumieť všetkým, ktoré sa vás týkajú, a vedieť ich obhájiť pred investorom rovnako presvedčivo, ako vedia obhájiť svoj produkt.


 Katedrála v Ceutě, autor fotografie
Katedrála v Ceutě, autor fotografie Výstavba vysokorychlostní trati Kenitra – Casablanca v Maroku (2025). Marocké ministerstvo dopravy,
Výstavba vysokorychlostní trati Kenitra – Casablanca v Maroku (2025). Marocké ministerstvo dopravy,  Příslušník rodu
Příslušník rodu  Vyznamenání pro každého úšastníka letošního MVW. Autorka: Emajeblahova,
Vyznamenání pro každého úšastníka letošního MVW. Autorka: Emajeblahova,  Tyranosaurus rex jménem Tristan v berlínském muzeu. Autor: Topi Pigula,
Tyranosaurus rex jménem Tristan v berlínském muzeu. Autor: Topi Pigula,  Surová ropa v polském Muzeu ropného a plynárenského průmyslu Ignáce Łukasiewicza. Autor: Topi Pigula,
Surová ropa v polském Muzeu ropného a plynárenského průmyslu Ignáce Łukasiewicza. Autor: Topi Pigula,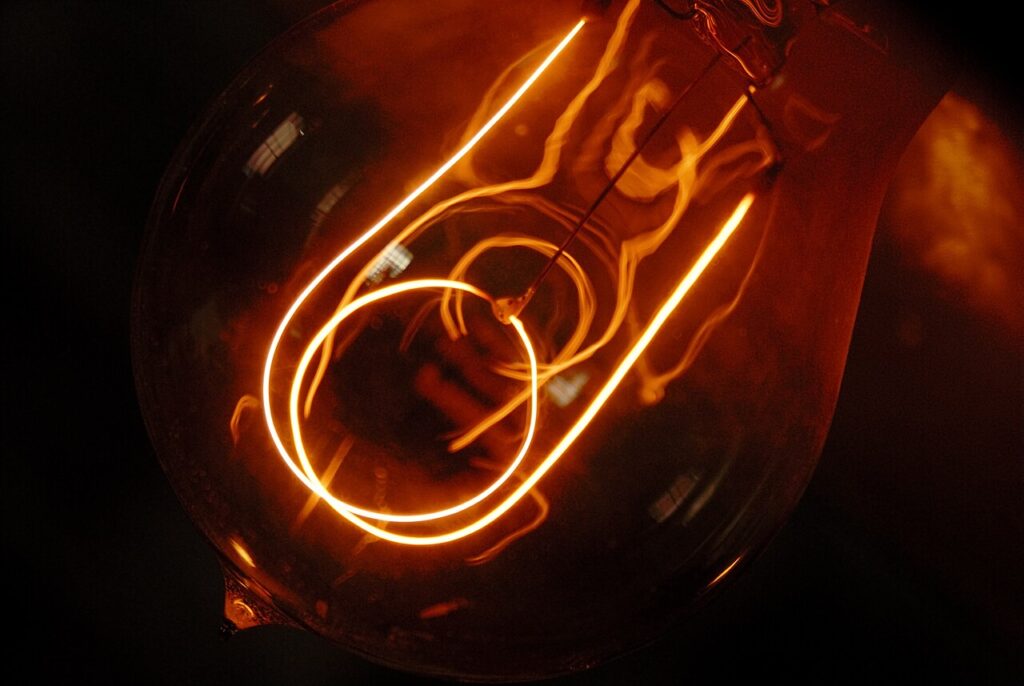 Žárovka, žhavicí vlákno historického kousku. Autor:
Žárovka, žhavicí vlákno historického kousku. Autor:  Jakub Cabal
Jakub Cabal 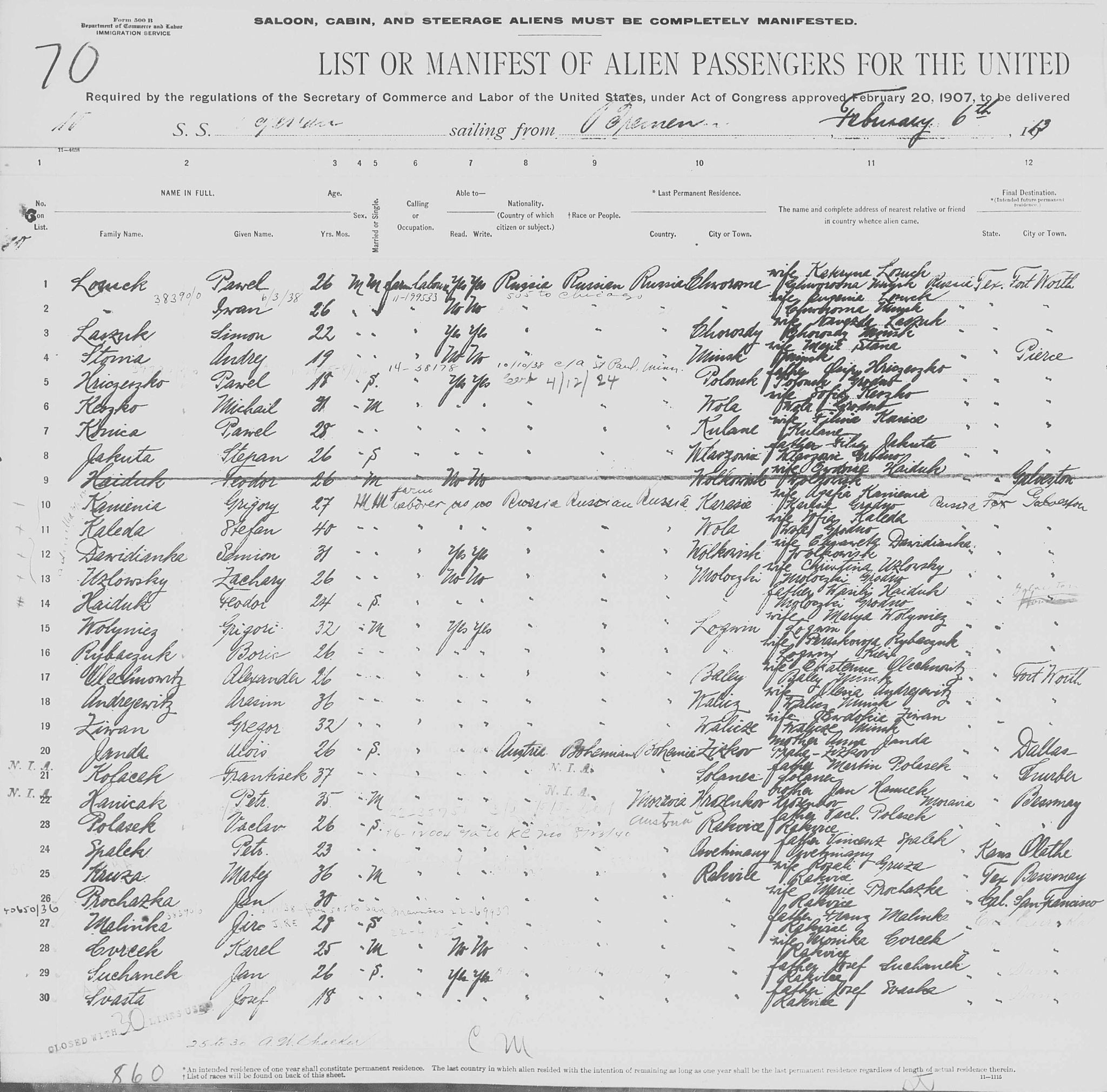 Seznam části pasažérů (včetně 7 Rakvičanů) na lodi plující v roce 1913 z Brém do Texasu.
Seznam části pasažérů (včetně 7 Rakvičanů) na lodi plující v roce 1913 z Brém do Texasu.
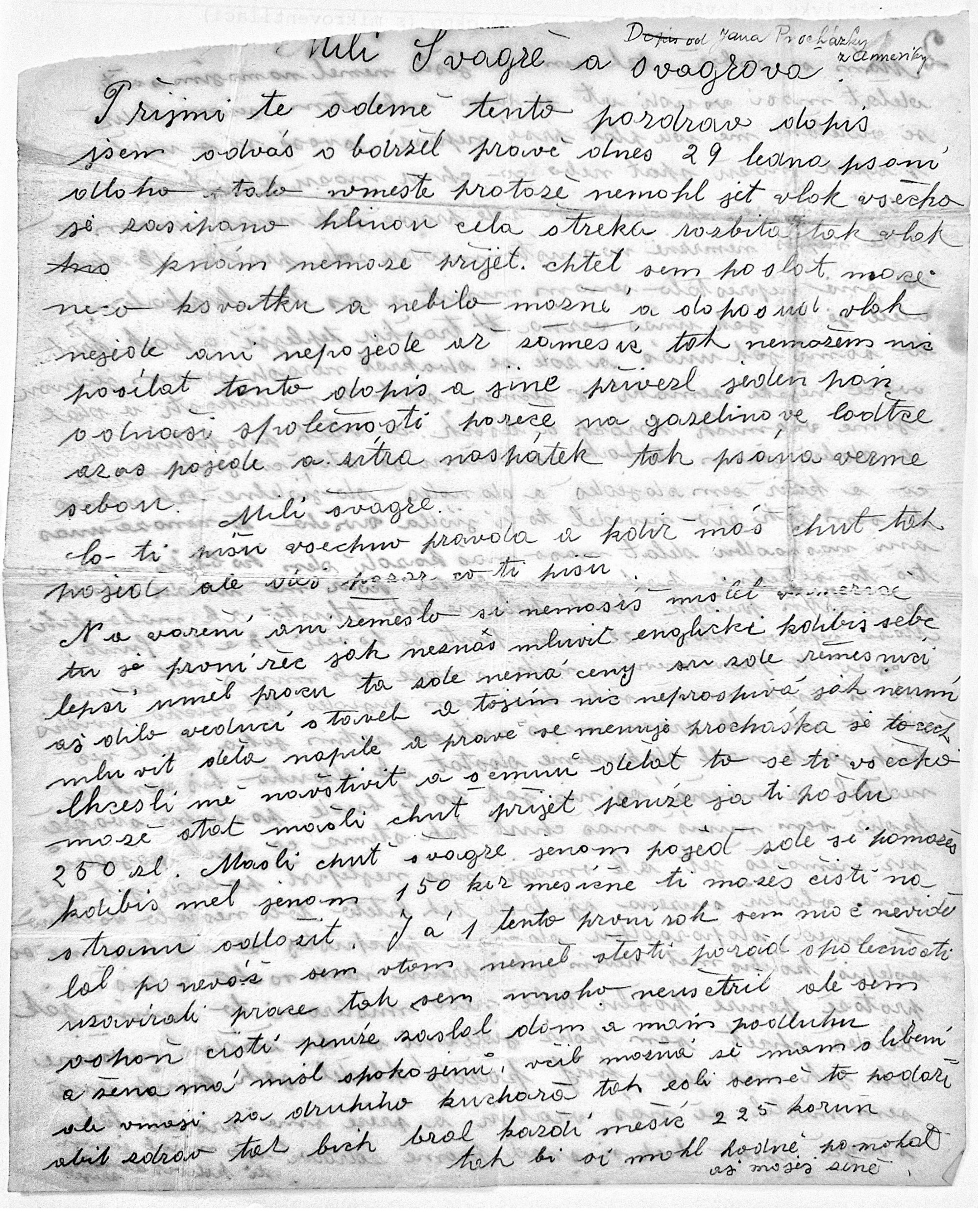 Dopis Jana Procházky z USA adresovaný švagrovi – strana 1.
Dopis Jana Procházky z USA adresovaný švagrovi – strana 1.
 Dopis Jana Procházky z USA adresovaný švagrovi – strana 2.
Dopis Jana Procházky z USA adresovaný švagrovi – strana 2.
 Dopis Jana Procházky z USA adresovaný švagrovi – strana 3.
Dopis Jana Procházky z USA adresovaný švagrovi – strana 3.
 Dopis Jana Procházky z USA adresovaný švagrovi – strana 4.
Dopis Jana Procházky z USA adresovaný švagrovi – strana 4.
 Jiří Eischmann
Jiří Eischmann  AI tento rok naplno vtrhla do vývoje softwaru a výrazně ovlivňuje také open-source projekty. V článku rozebírám několik trendů, které v open source v poslední době v souvislosti s AI pozoruji, a jak tyto trendy svět otevřeného softwaru mění.
AI tento rok naplno vtrhla do vývoje softwaru a výrazně ovlivňuje také open-source projekty. V článku rozebírám několik trendů, které v open source v poslední době v souvislosti s AI pozoruji, a jak tyto trendy svět otevřeného softwaru mění. 
 Lujza Bederka Kotočová (WMCZ), CC0, via Wikimedia Commons
Lujza Bederka Kotočová (WMCZ), CC0, via Wikimedia Commons Jozef Mlich
Jozef Mlich 



 Stejně jako většina Evropy i my v Brně jsme minulý týden zažili rekordní vlnu veder. Pro dům, který jsme dostavili před čtyřmi lety, to byla zajímavá zatěžkávací zkouška. Jak v ní obstál?
Stejně jako většina Evropy i my v Brně jsme minulý týden zažili rekordní vlnu veder. Pro dům, který jsme dostavili před čtyřmi lety, to byla zajímavá zatěžkávací zkouška. Jak v ní obstál? {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}